|
由于近期有不少朋友询问关于VR的种种问题,小猪想,林林总总的问题的答案不外乎都来源于这个事物本身的实质,咱们不妨来好好"解剖"一下这个看似"奇异"的东西~
前面我曾经给需要的朋友们比较粗略的介绍了一下VR的原理,相信大家还有印象吧~今天说的这些,可能还有您所未深入的东西哦~~
VIBRATION REDUCTION的作动通过镜身后组的VR组件来实现,这个最早诞生于"NIKON ZOOM 700VR QD"的东西,经过迄今13年的演化,已经逐渐平民化于NIKKOR远摄镜头中――所以可以说,用好它的必要性毋庸质疑了.在该组件的内部前视方向,你可以在12点和9点方向看到两个小突起,这两个应该分别就是纵向位置传感器和横向位置传感器,其原理应该就是光电信号转换,尼康镜头CPU进行实时光路角度计算,当抖动造成的光线与初试值发生差异时,传感器激发的电信号分别将偏差信号传送给CPU,由CPU验证计算后将补偿信号分别反馈给纵向和横向的两个VCM音圈马达去驱动震动来补偿光路――通过移动镜片反向补偿移动,从而抵消相机震动造成的影响.由此可以解决两个问题1:为什么我感到VR作用不是那么明显――说到底,解决的抖动是镜片反向补偿,在这个闭环中解决的问题是有限的,在昏暗的光线下手抖的厉害或者不正确的姿势等造成太大的影响,已经超出VR的能力范围~
2,为什么所有VR镜头都是AFS头?看到驱动马达是什么了吗,没有SWM的强劲动力怎么搞?而由于机身和镜头设计一体化的进化,在后组中还要加入这么个组件,G头的优势是非常明显的,所以伴随VR的几乎也全是G头~(尼康忍辱负重多年,用心可谓良苦~)
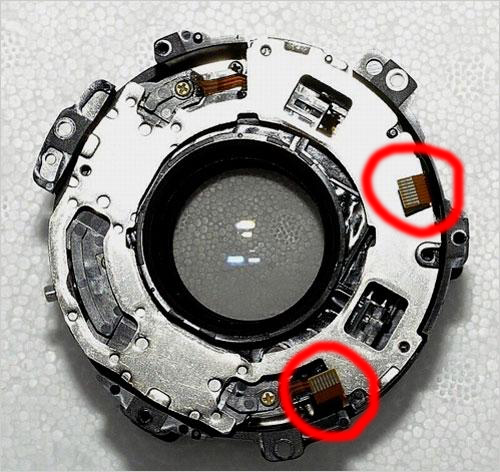
尼康的找不到,看佳能的吧,大体差不多,红线勾出的就是传感器~
不不猪 上传了这个图片:
____________________
彪悍的人生不需要任何解释。
|
